Multiple Regression
| Home | | Advanced Mathematics |Chapter: Biostatistics for the Health Sciences: Correlation, Linear Regression, and Logistic Regression
The only difference between multiple linear regression and simple linear regression is that the former introduces two or more predictor variables into the prediction model, whereas the latter introduces only one.
MULTIPLE REGRESSION
The only difference between multiple linear
regression and simple linear regression is that the former introduces two or
more predictor variables into the prediction model, whereas the latter
introduces only one. Although we often use a model of Y = a + βX for the
form of the regression function that relates the predictor (indepen-dent)
variable X to the outcome or response
(dependent) variable Y, we could also
use a model such as Y = α + βX2 or Y = α + β lnX (where ln refers to the
log func-tion). The function is linear in the regression parameters α and β.
In addition to the linearity
requirement for the regression model, the other re-quirement for regression
theory to work is that the observed values of Y differ from the regression function by an independent random
quantity, or noise term (error variance term). The noise term has a mean of
zero and variance of σ2. In addition, σ 2 does not depend on X. Under these assumptions the method of least squares pro-vides
estimates a and b for α and β, respectively, which have desirable statistical properties (i.e.,
minimum variance among unbiased estimators).
If the noise term also has a normal distribution,
then its maximum likelihood es-timator can be obtained. The resulting
estimation is known as the Gauss–Markov theorem, the derivation of which is
beyond the scope of the present text. The inter-ested reader can consult Draper
and Smith (1998), page 136, and Jaske (1994).
As with simple linear regression, the Gauss–Markov
theorem applies to multiple linear regression. For a simple linear regression,
we introduced the concept of a noise, or error, term. The prediction equation
for multiple linear regression also contains an error term. Let us assume a
normally distributed additive error term with variance that is independent of
the predictor variables. The least squares esti-mates for the regression
coefficients used in the multiple linear regression model exist; under certain
conditions, they are unique and are the same as the maximum likelihood
estimates [Draper and Smith (1998) page 137].
However, the use of matrix algebra is required to
express the least squared esti-mates. In practice, when there are two or more
possible variables to include in a re-gression equation, one new issue arises
regarding the particular subset of variables that should go into the final
regression equation. A second issue concerns the prob-lem of multicollinearity,
i.e., the predictor variables are so highly intercorrelated that they produce
instability problems.
In addition, one must assess the correlation
between the best fitting linear combination of predictor variables and the
response variable instead of just a simple cor-relation between the predictor
variable and the response variable. The square of the correlation between the
set of predictor variables and the response variable is called R2, the multiple correlation
coefficient. The term R2 is interpreted as the percentage of the variance in the response
variable that can be explained by the regression function. We will not study
multiple regression in any detail but will provide an ex-ample to guide you
through calculations and their interpretation.
The term “multicollinearity” refers to a situation
in which there is a strong, close to linear relationship among two or more
predictor variables. For example, a predic-tor variable X1 may be approximately equal to 2X2 + 5X3
where X2 and X3 are two other variables
that we think relate to our response variable Y.
To understand the concept of linear combinations,
let us assume that we include all three variables (X1 + X2
+ X3) in a regression
model and that their relationship is exact. Suppose that the response variable Y = 0.3 X1 + 0.7 X2
+ 2.1 X3 + ε, where ε is normally distributed
with mean 0 and variance 1.
Since X1
= 2X2 + 5X3, we can substitute the
right-hand side of this equation into the expression for Y. After substitution we have Y
= 0.3(2 X2 + 5X3) + 0.7X2 + 2.1X3
+ ε = 1.3X2 + 3.6X3 + ε. So when one of the predictors
can be expressed as a linear function of the other, the regression coefficients
associated with the predictor vari-ables do not remain the same. We provided
examples of two such expressions: Y =
0.3X1 + 0.7X2 + 2.1X3 + ε and Y =
0.0X1 + 1.3X2 + 3.6X3 + ε. There are an infinite number of possible choices
for the regression coefficients, depending on the linear combinations of the
predictors.
In most practical situations, an exact linear
relationship will not exist; even a re-lationship that is close to linear will
cause problems. Although there will be (unfor-tunately) a unique least squares
solution, it will be unstable. By unstable we mean that very small changes in
the observed values of Y and the X’s can produce drastic changes in the
regression coefficients. This instability makes the coefficients im-possible to
interpret.
There are solutions to the problem that is caused
by a close linear relationship among predictors and the outcome variable. The
first solution is to select only a subset of the variables, avoiding predictor
variables that are highly interrelated (i.e., multicollinear). Stepwise
regression is a procedure that can help overcome multi-collinearity, as is
ridge regression. The topic of ridge regression is beyond the scope of the
present text; the interested reader can consult Draper and Smith (1998),
Chapter 17. The problem of multicollinearity is also called “ill-conditioning”;
is-sues related to the detection and treatment of regression models that are
ill-condi-tioned can be found in Chapter 16 of Draper and Smith (1998). Another
approach to multicollinearity involves transforming the set of X’s to a new set of variables that are
“orthogonal.” Orthogonality, used in linear algebra, is a technique that will
make the X’s uncorrelated; hence, the
transformed variables will be well-condi-tioned (stable) variables.
Stepwise regression is one of many techniques
commonly found in statistical soft-ware packages for multiple linear
regression. The following account illustrates how a typical software package
performs a stepwise regression analysis. In stepwise re-gression we start with
a subset of the X variables that we
are considering for inclusion in a prediction model. At each step we apply a
statistical test (often an F test) to
de-termine if the model with the new variable included explains a significantly
greater percentage of the variation in Y
than the previous model that excluded the variable.
If the test is significant, we add the variable to
the model and go to the next step of examining other variables to add or drop.
At any stage, we may also decide to drop a variable if the model with the variable
left out produces nearly the same per-centage of variation explained as the
model with the variable entered. The user specifies critical values for F called the “F to enter” and the “F to
drop” (or uses the default critical values provided by a software program).
Taking into account the critical values and a list
of X variables, the program pro-ceeds
to enter and remove variables until none meets the criteria for addition or
deletion. A variable that enters the regression equation at one stage may still
be re-moved at another stage, because the F
test depends on the set of variables currently in the model at a particular
iteration.
For example, a variable X may enter the regression equation because it has a great deal of
explanatory power relative to the current set under consideration. However,
variable X may be strongly related to
other variables (e.g., U, V, and Z) that enter later. Once these other variables are added, the
variable X could provide little
additional explanatory information than that contained in variables U, V,
and Z. Hence, X is deleted from the regression equation.
In addition to multicollinearity problems, the
inclusion of too many variables in the equation can lead to an equation that
fits the data very well but does not do near ly as well as equations with fewer
variables when predicting future values of Y
based on known values of x. This
problem is called overfitting. Stepwise regression is useful because it reduces
the number of variables in the regression, helping with overfitting and
multicollinearity problems. However, stepwise regression is not an optimal
subset selection approach; even if the F
to enter criterion is the same as the F to
leave criterion, the resulting final set of variables can differ from one
another depending on the variables
that the user specifies for the starting set.
Two alternative approaches to stepwise regression
are forward selection and backward elimination. Forward selection starts with
no variables in the equation and adds them one at a time based solely on an F to enter criterion. Backward
elim-ination starts with all the variables in the equation and drops variables
one at a time based solely on an F to
drop criterion. Generally, statisticians consider stepwise re-gression to be
better than either forward selection or backward elimination. Step-wise
regression is preferred to the other two techniques because it tends to test
more subsets of variables and generally settles on a better choice than either
forward se-lection or backward elimination. Sometimes, the three approaches
will lead to the same subset of variables, but often they will not.
To illustrate multiple regression, we will consider
the example of predicting votes for Buchanan in Palm Beach County based on the
number of votes for Nader, Gore, and Bush (refer back to Section 12.7). For all
counties except Palm Beach, we fit the model Y = α + β1X1 + β2X2 + β3X3 + ε,
where X1 represents votes
for Nader, X2 votes for
Bush, and X3 votes for
Gore; ε is a random noise term with mean 0 and variance σ2 that is
independent of X1, X2, and X3; and α, β1, β2, and β3 are the regression parameters. We will entertain
this model and others with one of the predictor variables left out. To do this
we will use the SAS procedure REG and will show you the SAS code and output.
You will need a statistical computer pack-age to solve most multiple regression
problems. Multiple regression, which can be found in most of the common
statistical packages, is one of the most widely used applied statistical
techniques.
The following three regression models were
considered:
1. A model including votes for
Nader, Bush, and Gore to predict votes for Buchanan
2. A model using only votes for
Nader and Bush to predict votes for Buchanan
3. A model using votes for Nader
and Bush and an nteraction term defined as the product of the votes for Nader
and the votes for Bush
The coefficient for votes for Gore in model (1) was
not statistically significant, so model (2) is probably better than (1) for
prediction. Model (3) provided a slightly bet-ter fit than model (2), and under
model (3) all the coefficients were statistically sig-nificant. The SAS code
(presented in italics) used to obtain the results is as follows:
data florida:
input county $ gore bush buchanan nader;
cards;
alachua 47300 34062 262 3215
baker 2392 5610 73 53
bay 18850 38637 248 828
:
:.
walton 5637 12176 120 265
washngtn 2796 4983 88 93
;
data florid2;
set florida;
if county = ‘palmbch’ then delete;
nbinter = nader*bush;
run;
proc reg;
model buchanan = nader bush gore;
run;
proc reg;
model buchanan = nader bush;
run;
proc reg;
model buchanan = nader bush nbinter;
run;
The data statement at the beginning creates an SAS
data set “florida” with “county” as a character variable and “gore bush
buchanan and nader” as numeric variables. The input statement identifies the
variable names and their formats ($ is the symbol for a character variable).
The statement “cards” indicates that the input is to be read from the lines of
code that follow in the program.
On each line, a character variable of 8 characters
or less (e.g., alachua) first ap-pears; this character variable is followed by
four numbers indicating the values for the numeric variables gore, bush,
buchanan, and nader, in that order. The process is continued until all 67 lines
of counties are read. Note that, for simplicity, we show only the input for the
first three lines and the last two lines, indicating with three dots that the
other 62 counties fall in between. This simple way to read data is suit-able
for small datasets; usually, it is preferable to store data on files and have
SAS read the data file.
The next data step creates a modified data set,
florid2, for use in the regression modeling. Consequently, we remove Palm Beach
County (i.e., the county variable with the value ‘palmbch’). We also want to
construct an interaction term for the third model. The interaction between the
votes for Nader and the votes for Bush is modeled by the product nader*bush. We
call this new variable nbinter.
Now we are ready to run the regressions. Although
we could use three model statements in a single regression procedure, instead
we performed the regression as three separate procedures. The model statement
specifies the dependent variable on the left side of the equation. On the right
side of the equation is the list of predictor variables. For the first
regression we have the variables nader, bush, and gore; for the second just the
variables nader and bush. The third regression specifies nader, bush, and their
interaction term nbinter.
The output (presented in bold face) appears as
follows:
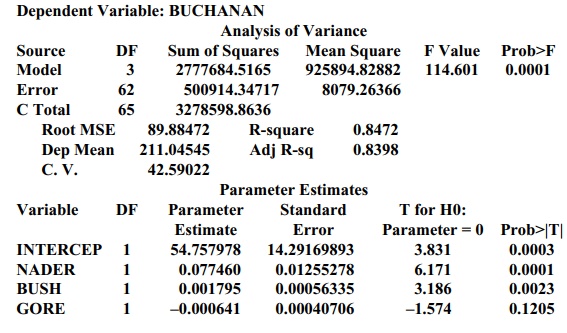
Model: MODEL1 (using votes for Nader, Bush, and Gore to predict votes
for Buchanan)
Dependent Variable: BUCHANAN
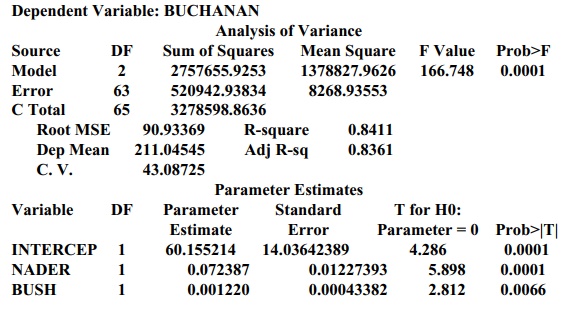
Model: MODEL2 (using votes for Nader and Bush to predict votes for
Buchanan)
Dependent Variable: BUCHANAN
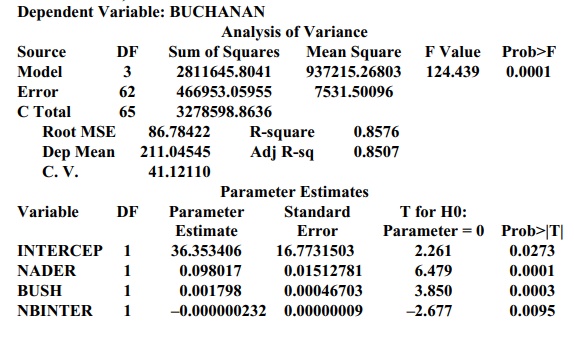
Model: MODEL3 (using votes for Nader and Bush plus an interaction term, Nader*Bush)
Dependent Variable: BUCHANAN
For each model, the value of R2 describes the percentage of the variance in the votes
for Buchanan that is explained by the predictor variables. By taking into
ac-count the joint influence of the significant predictor variables in the
model, the adjusted R2
provides a better measure of goodness of fit than do the individual
predictors. Both models (1) and (2) have very similar R2 and adjusted R2
values. Model (3) has slightly higher R2
and adjusted R2 values
than does either model (1) or model (2).
The F
test for each model shows a p-value
less than 0.0001 (the column labeled Prob>F), indicating that at least one
of the regression parameters is different from zero. The individual t test on the coefficients suggests the
coefficients that are different from zero. However, we must be careful about
the interpretation of these results, due to multiple testing of coefficients.
Regarding model (3), since Bush received 152,846
votes and Nader 5564, the equation predicts that Buchanan should have 659.236
votes. Model (1) uses the 268,945 votes for Gore (in addition to those for
Nader and Bush) to predict 587.710 votes for Buchanan. Model (2) predicts the
vote total for Buchanan to be 649.389. Model (3) is probably the best model,
for it predicts that the votes for Buchanan will be less than 660. So again we
see that any reasonable model would predict that Buchanan would receive 1000 or
fewer votes, far less than the 3407 he actually received!
Related Topics
