Probability Distributions
| Home | | Advanced Mathematics |Chapter: Biostatistics for the Health Sciences: Basic Probability
Probability distributions describe the probability of events. Parameters are characteristics of probability distributions.
PROBABILITY DISTRIBUTIONS
Probability distributions describe the probability
of events. Parameters are characteristics of probability distributions. The
statistics that we have used to estimate pa-rameters are also called random
variables. We are interested in the distributions of these statistics and will
use them to make inferences about population parameters.
We will be able to draw inferences by constructing
confidence intervals or test-ing hypotheses about the parameters. The methods
for doing this will be developed in Chapters 8 and 9, but first you must learn
the basic probability distributions and the underlying bases for the ones we
will use later.
We denote the statistic, or random variable, with a
capital letter—often “X.” We
distinguish the random variable X
from the value it takes on in a particular experi-ment by using a lower case x for the latter value. Let A = [X
= x]. Assume that A = [X = x] is an event that is similar to
the events described earlier in this chapter. If X is a discrete variable that takes on only a finite set of values,
the events of the form A = [X = x] have positive probabilities
associated with some finite set of values for x and zero probability for all other values of x.
A discrete variable is one that can take on
distinct values for each individual measurement. We can assign a positive
probability to each number. The probabili-ties associated with each value of a
discrete variable can form an infinite set of val-ues, known as an infinite
discrete set. The discrete set also could be finite. The most common example of
an infinite discrete set is a Poisson random variable, which as-signs a
positive probability to all the non-negative integers, including zero. The
Poisson distribution is a type of distribution used to portray events that are
infre-quent (such as the number of light bulb failures). The degree of
occurrence of events is determined by the rate parameter. By infrequent we mean
that in a short interval of time there cannot be two events occurring. An
example of a distribution that is discrete and finite is the binomial
distribution, to be discussed in detail later. For the binomial distribution,
the random variable is the number of successes in n trials; it can take on the n
+ 1 discrete values 0, 1, 2, 3, . . . , n.
Frequently, we will deal with another type of
random variable, the absolutely continuous random variable. This variable can
take on values over a continuous range of numbers. The range could be an
interval such as [0, 1], or it could be the entire set of real numbers. A
random variable with a uniform distribution illustrates a distribution that
uses a range of numbers in an interval such as [0, 1]. A uniform distribution
is made from a dataset in which all of the values have the same chance of
occurrence. The normal, or Gaussian, distribution is an example of an
absolutely continuous distribution that takes on values over the entire set of
real numbers.
Absolutely continuous random variables have
probability densities associated with them. You will see that these densities
are the analogs to probability mass functions that we will define for discrete
random variables.
For absolutely continuous random variables, we will
see that events such as A = P(X
= x) are meaningless because for any value x, P(X = x) = 0. To obtain mean-ingful
probabilities for absolutely continuous random variables, we will need to talk
about the probability that X falls
into an interval of values such as P(0
< X < 1). On such intervals, we
can compute positive probabilities for these random variables.
Probability distributions have certain
characteristics that can apply to both ab-solutely continuous and discrete
distributions. One such property is symmetry. A probability distribution is
symmetric if it has a central point at which we can con-struct a vertical line
so that the shape of the distribution to the right of the line is the mirror
image of the shape to the left.
We will encounter a number of continuous and
discrete distributions that are symmetric. Examples of absolutely continuous
distributions that are symmetric are the normal distribution, Student’s t distribution, the Cauchy distribution,
the uni-form distribution, and the particular beta distribution that we discuss
at the end of this chapter.
The binomial distribution previously mentioned
(covered in detail in the next section) is a discrete distribution. The
binomial distribution is symmetric if, and only if, the success probability p = 1/2. To review, the toss of a fair
coin has two possible outcomes, heads or tails. If we want to obtain a head
when we toss a coin, the head is called a “success.” The probability of a head
is 1/2.
Probability distributions that are not symmetric are called skewed distributions. There are two kinds of skewed distributions: positively skewed and negatively skewed. Positively skewed distributions have a higher concentration of probability mass or density to the left and a long, declining tail to the right, whereas negatively skewed distributions have probability mass or density concentrated to the right with a long, declining tail to the left.
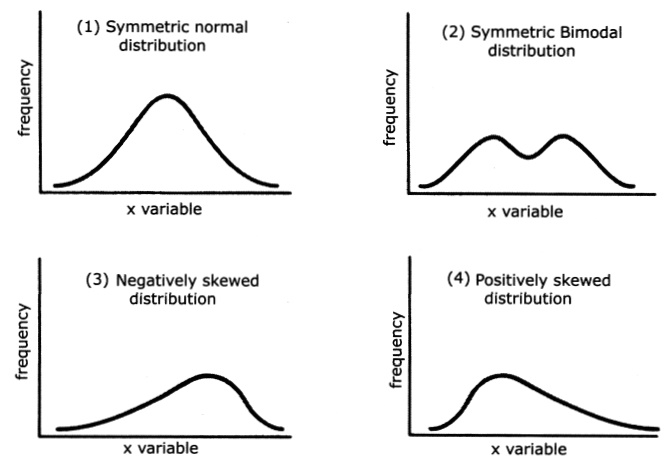
Figure 5.4. Continuous probability densities.
Figure 5.4 shows continuous probability densities corresponding to: (1) a symmetric normal distribution, (2) a symmetric bimodal
distribution, (3) a negatively skewed distribution, and (4) a positively skewed
distribution. The negative expo-nential distribution and the chi-square
distribution are examples of positively skewed distributions.
Beta distributions and binomial distributions (both
to be described in detail later) can be symmetric, positively skewed, or
negatively skewed depending on the val-ues of certain parameters. For instance,
the binomial distribution is positively skewed if p < 1/2, is symmetric if p
= 1/2, and is negatively skewed if p
> 1/2.
Now let us look at a familiar experiment and define
a discrete random variable associated with that experiment. Then, using what we
already know about probabil-ity, we will be able to construct the probability
distribution for this random variable.
For the experiment, suppose that we are tossing a
fair coin three times in indepen-dent trials. We can enumerate the elementary
outcomes: a total of eight. With H
de-noting heads and T tails, the triplets
are: {H, H, H}, {H, H,
T}, {H, T, H}, {H,
T, T}, {T, H, H},
{T, H, T}, {T, T,
H}, and {T, T, T}. We can classify these eight
elementary events as follows: E1
= {H, H, H}, E2 = {H, H, T}, E3
= {H, T, H}, E4 = {H, T, T}, E5
= {T, H, H}, E6 = {T, H, T}, E7
= {T, T, H}, and E8 = {T, T, T}.
We want Z
to denote the random variable that counts the number of heads in the
experiment. By looking at the outcomes above, you can see that Z can take on the values 0, 1, 2, and 3.
You also know that the 8 elementary outcomes above are equally likely because
the coin is fair and the trials are independent. So each triplet has a
probability of 1/8. You have learned that elementary events are mutually ex
clusive (also called disjoint). Consequently, the probability of the union of
elemen-tary events is just the sum of their individual probabilities.
You are now ready to compute the probability
distribution for Z. Since Z can be only 0, 1, 2, or 3, we know its
distribution once we compute P(Z = 0), P(Z = 1), P(Z
= 2), and P(Z = 3). Each of these events {Z
= 0}, {Z = 1}, {Z = 2}, and {Z = 3} can be described
as the union of a certain set of these elementary events.
For example, Z
= 0 only if all three tosses are tails. E8
denotes the elementary event {T, T, T}.
We see that P(Z = 0) = P(E8) = 1/8. Similarly, Z = 3 only if all three tosses are
heads. E1 denotes the
event {H, H, H}; therefore, P(Z
= 3) = P(E1) = 1/8.
Consider the event Z = 1. For Z = 1, we have
exactly one head and two tails. The elementary events that lead to this outcome
are E4 = {H, T,
T}, E6 = {T, H, T},
and E7 = {T, T,
H}. So P(Z = 1) = P(E4 U E6 U E7).
By the addition law for mutually exclusive
events, we have P(Z = 1) = P(E4 U E6 U E7) = P(E4) + P(E6) + P(E7)
= 1/8 + 1/8 + 1/8 = 3/8.
Next, consider the event Z = 2. For Z = 2 we have
exactly one tail and two heads. Again there are three elementary events that
give this outcome. They are E2
= {H, H, T}, E3 = {H, T, H}, and E5 = {T, H, H}.
So P(Z = 2) = P(E2 U E3 U E5).
By the addition law for mutually exclusive events, we have P(Z = 2) = P(E2
U E3 U E5) = P(E2) + P(E3)
+ P(E5) = 1/8 + 1/8 + 1/8 = 3/8.
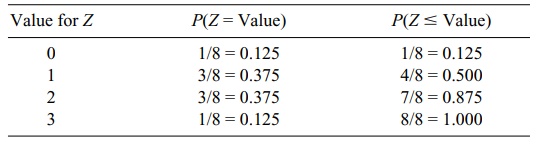
Table 5.1 gives the distribution for Z. The second column of the table is
called the probability mass function for Z.
The third column is the cumulative probability function. The value shown in the
first cell of the third column is carried over from the first cell of the
second column. The value shown in the second cell of the third column is the
sum of the values shown in cell one and in all of the cells above cell two of
the second column. Each of the remaining values shown in the third column can
be found in a similar manner, e.g., the third cell in column 3 (0.875) = (0.125
+ 0.375 + 0.375). We will find analogs for the absolutely continuous
distribution functions.
Recall another way to perform the calculation. In
the previous section, we learned how to use permutations and combinations as a
shortcut to calculating such probabilities. Let us see if we can determine the
distribution of Z using combinations.
To obtain Z = 0, we need three tails for three objects. There are C(3, 3) ways to do this. C(3, 3) = 3!/[(3 – 3)! 3!] = 3!/[0! 3!]
= 1. So P(Z = 0) = C(3, 3)/8 = 1/8
= 0.125.
TABLE 5.1. Probability Distribution for Number of Heads in Three Coin
Tosses
To find Z
= 1, we need two tails and one head. Order does not matter, so the number of
ways of choosing exactly two tails out of three is C(3, 2) = 3!/[(3 – 2)! 2!] = 3!/[1! 2!] = 3 × 2/2 = 3. So P(Z
= 1) = C(3, 2)/8 = 3/8 = 0.375.
Now for Z
= 2, we need one tail and two heads. Thus, we must select exactly one tail out
of three choices; order does not matter. So P(Z = 2) = C(3, 1)/8 and C(3, 1) =
3!/[(3 – 1)! 1!] = 3!/[2! 1!] = 3 × 2/2 = 3. Therefore, P(Z = 2) = C(3, 1)/8 = 3/8 = 0.375.
For P(Z = 3), we must have no tails out of
three selections. Again, order does not matter, so P(Z = 3) = C(3, 0)/8 and C(3, 0) = 3!/[(3 – 0)! 0!] = 3!/[3! 0!] = 3!/3! = 1. Therefore, P(Z
= 3) = C(3, 0)/8 = 1/8 = 0.125.
Once one becomes familiar with this method for
computing permutations, it is simpler than having to enumerate all of the
elementary outcomes. The saving in time and effort becomes much more apparent
as the space of possible outcomes in-creases markedly. Consider how tedious it
would be to compute the distribution of the number of heads when we toss a coin
10 times!
The distribution we have just seen is a special
case of the binomial distribution that we will discuss in Section 5.7. We will
denote the binomial distribution as Bi(n, p).
The two parameters n and p determine the distribution. We will
see that n is the number of trials and p
is the probability of success on any one trial. The binomial random variable is
just the count of the number of successes.
In our example above, if we call a head on a trial
a success and a tail a failure, then we see that because we have a fair coin, p = 1/2 = 0.50. Since we did three
in-dependent tosses of the coin, n =
3. Therefore, our exercise derived the distribution Bi(3, 0.50).
In previous chapters we talked about means and
variances as parameters that measure location and scale for population
variables. We saw how to estimate means and variances from sample data. Also,
we can define and compute these population parameters for random variables if
we can specify the distribution of these variables.
Consider a discrete random variable such as the
binomial, which has a positive probability associated with a finite set of
discrete values x1, x2, x3, . . . , xn.
To each value we associate the probability mass pi for i = 1,
2, 3, . . . , n. The mean μ for this random variable is
defined as μ = Σni=1 pixi.
The variance σ2 is defined as σ 2 = Σni=1 pi(xi – μ)2. For the Bi(n, p) distribution it is easy to verify that μ = np and σ 2 = npq, where q = 1 – p. For an example, refer to Exercise
5.21 at the end of this chapter.
Up to this point, we have discussed only discrete
distributions. Now we want to consider random variables that have absolutely
continuous distributions. The sim-plest example of an absolutely continuous
distribution is the uniform distribution on the interval [0, 1]. The uniform
distribution represents the distribution we would like to have for random
number generation. It is the distribution that gives every real number in the
interval [0, 1] an “equal” chance of being selected, in the sense that any
subinterval of length L has the same
probability of selection as any other subinterval of length L.
Let U be a uniform random variable on [0, 1]; then P{0 ≤ U ≤ x) = x for any x satisfying
0 ≤ x ≤ 1. With this definition and
using calculus, we see that the func-tion F(x) = P{0
≤ U ≤ x) = x is differentiable
on [0, 1]. We denote its derivative by f(x). In this case, f(x) = 1 for 0 ≤ x ≤ 1, and f(x) = 0 otherwise.
Knowing that f(x) = 1 for 0 ≤ x ≤ 1, and f(x) = 0 otherwise, we find that for any a
and b satisfying 0 ≤ a ≤ b ≤ 1, P(a ≤ U ≤ b) = b – a.
So the probability that U falls in
any particular interval is just the length of the interval and does not depend
on a. For example, P(0 ≤ U ≤ 0.2) = P(0.1
≤ U ≤ 0.3) = P(0.3 ≤ U ≤ 0.5) = P(0.4 U ≤ 0.6) = P(0.7 ≤ U ≤ 0.9) = P(0.8 ≤ U ≤ 1.0) = 0.2.
Many other absolutely continuous distributions
occur naturally. Later in the text, we will discuss the normal distribution and
the negative exponential distribution, both of which are important absolutely
continuous distributions.
The material described in the next few paragraphs
uses results from elementary calculus. You are not expected to know calculus.
However, if you read this material and just accept the results from calculus as
facts, you will get a better appreciation for continuous distributions than you
would if you skip this section.
It is easy to define absolutely continuous
distributions. All you need to do is de-fine a continuous function, g, on an interval or on the entire line
such that g has a fi-nite integral.
Suppose the value of the integral is c. One then obtains a density function f(x)
by defining f(x) = g(x)/c.
Then, integrating f over the region
where g is not zero gives the value
1. The integral of f we will call F, which when integrated from the
smallest value with a nonzero density to a specified point x is the cumulative dis-tribution function. It has the property
that it starts out at zero at the first real val-ue for which f > 0 and increases to 1 as we
approach the largest value of x for
which f > 0.
Let us consider a special case of a family of
continuous distributions on [0, 1] called the beta family. The beta family
depends on two parameters α and β. We will look at a special case where α = 2 and β = 2. In general, the beta density is f(x) = B(α, β)xa–1 (1 – x)b–1. The term B(α, β) is a constant that is chosen so that the integral of the function g from 0 to 1 is equal to 1. This
function is known as the beta function. In the special case we simply define g(x)
= x(1 – x) for 0 ≤ x ≤ 1 and g(x) = 0 for all other values of x.
Call the integral of g, G.
By integral calculus, G(x) = x2/2 – x3/3 for all 0 ≤ x ≤ 1, G(x) = 0 for x > 0, and G(x) = 1/6 for all x > 1. Now G(1) = 1/6
is the integral of g over the
interval [0, 1]. Therefore, G(1) is the constant c that we want.
Let f(x) = g(x)/c
= x(1 – x)/(1/6) = 6x(1 – x) for 0 ≤ x ≤ 1 and f(x) = 0 for all oth-er x. The quantity 1/G(1) is the constant for the beta density f. In our general formu-la it was B(α, β). In
this case, since α = 2 and β = 2 we have B(2, 2) = 1/G(1) = 6. This function f is a probability density function (the
analog for absolutely continu-ous random variables to the probability mass
function for discrete random vari-ables). The cumulative probability
distribution function is F(x) = x2(3
– 2x) = 6G(x) for 0 ≤ x ≤ 1, F(x) = 0 for x < 0, and F(x) = 1 for x > 1. We see that F(x) = 6G(x) for all x.
We can define, by analogy to the definitions for
discrete random variables, the mean μ and the variance σ2 for a continuous random variable. We simply use
the integration symbol in place of the summation sign, with the density
function f taking the place of the
probability mass function. Therefore, for an absolutely continu-ous random
variable X, we have μ = ∫xf (x)dx
and σ2 = ∫ (x – μ)2f (x)dx.
For the uniform distribution on [0, 1], you can
verify that μ = 1/2 and σ2 = 1/12 if you know some basic integral calculus.
Related Topics
