Coefficient of Variation (CV) and Coefficient of Dispersion (CD)
| Home | | Advanced Mathematics |Chapter: Biostatistics for the Health Sciences: Summary Statistics
Useful and meaningful only for variables that take on positive values, the coefficient of variation is defined as the ratio of the standard deviation to the absolute value of the mean.
COEFFICIENT OF VARIATION (CV) AND COEFFICIENT OF DISPERSION (CD)
Useful and meaningful only for variables that take
on positive values, the coefficient of variation is defined as the ratio of
the standard deviation to the absolute value of the mean. The coefficient of
variation is well defined for any variable (includ-ing a variable that can be
negative) that has a nonzero mean.
Let θ and V symbolize the coefficient of variation in the population and sample, respectively. Refer to Formulas 4.13a and 4.13b for calculating θ and V.
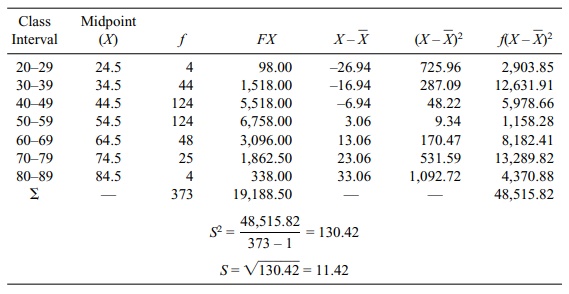
TABLE 4.8. Ages of Patients Diagnosed with Multiple Sclerosis: Sample
Variance and Standard Deviation Calculations Using the Formulae for Grouped
Data
Usually represented as a percentage, sometimes θ is thought of as a measure of
relative dispersion. A variable with a population standard deviation of σ and a mean μ > 0 has a coefficient of variation θ = 100(σ/μ)%.
Given a data set with a sample mean ![]() > 0 and standard deviation S, the sample coefficient of variation
is V = 100(S/
> 0 and standard deviation S, the sample coefficient of variation
is V = 100(S/![]() )%. The term
V is the obvious sample analog to the
population coefficient of variation.
)%. The term
V is the obvious sample analog to the
population coefficient of variation.
The original purpose of the coefficient of
variation was to make comparisons be-tween different distributions. For
instance, if we want to see whether the distribu-tion of the length of the
tails of mice is similar to the distribution of the length of elephants’ tails,
we could not meaningfully compare their actual standard deviations. In
comparison to the standard deviation of the tails of mice, the standard
devi-ation of elephants’ tails would be larger simply because of the much
larger mea-surement scale being used. However, these very differently sized
animals might very well have similar coefficients of variation with respect to
their tail lengths.
Another estimator, V*, the coefficient of variation biased adjusted estimate, is often
used for the sample estimate of the coefficient of variation because it has
less bias in estimating θ. V* = V{1 + (1/[4n])}, where n is the sample size. So V* in-creases V by a factor of 1/(4n)
or adds V/(4n) to the estimate of V.
Formula 4.14 shows the formula for V*:

This estimate and further discussion of the
coefficient of variation can be found in Sokal and Rohlf (1981).
Formulas 4.15a and 4.15b present the formula for the coefficient of dispersion (CD):
Similar to V,
CD is the ratio of the variance to
the mean. If we think of V as a ratio
rather than a percentage, we see that CD
is just ![]() V2.
The coefficient of dispersion is related to the Poisson distribution, which we
will explain later in the text. Often, the Poisson distribution is a good model
for representing the number of events (e.g., traf-fic accidents in Los Angeles)
that occur in a given time interval. The Poisson distrib-ution, which can take
on the value zero or any positive value, has the property that its mean is
always equal to its variance. So a Poisson random variable has a coefficient of
dispersion equal to 1. The CD is the sample estimate of the coefficient of
disper-sion. Often, we are interested in count data. You will see many
applications of count data when we come to the analysis of survival times in
Chapter 15.
V2.
The coefficient of dispersion is related to the Poisson distribution, which we
will explain later in the text. Often, the Poisson distribution is a good model
for representing the number of events (e.g., traf-fic accidents in Los Angeles)
that occur in a given time interval. The Poisson distrib-ution, which can take
on the value zero or any positive value, has the property that its mean is
always equal to its variance. So a Poisson random variable has a coefficient of
dispersion equal to 1. The CD is the sample estimate of the coefficient of
disper-sion. Often, we are interested in count data. You will see many
applications of count data when we come to the analysis of survival times in
Chapter 15.
We may want to know whether the Poisson
distribution is a reasonable model for our data. One way to ascertain the fit
of the data to the Poisson distribution is to ex-amine the CD. If we have
sufficient data, the CD will provide a good estimate of the population
coefficient of dispersion. If the Poisson model is reasonable, the estimat-ed
CD should be close to 1. If the CD is much less than 1, then the counting
process is said to be underdispersed (meaning that the CD has less variance
relative to the mean than a Poisson counting process). On the other hand, a
counting process with a value of CD that is much greater than 1 indicates
overdispersion (the opposite of underdispersion).
Overdispersion occurs commonly as a counting
process that provides a mixture of two or more different Poisson counting
processes. These so-called compound Poisson processes occur frequently in
nature and also in some manmade events. A hypothetical example relates to the
time intervals between motor vehicle accidents in a specific community during a
particular year. The data for the time intervals be-tween motor vehicle
accidents might fit well to a Poisson process. However, the data aggregate
information for all ages, e.g., young people (18–25 years of age), mature
adults (25–65 years of age), and the elderly (above 65 years of age). The motor
vehicle accident rate is likely to be higher for the inexperienced young
peo-ple than for the mature adults. Also, the elderly, because of slower
reflexes and poorer vision, are likely to have a higher accident rate than the
mature adults. The motor vehicle accident data for the combined population of
drivers represents an accumulation of three different Poisson processes
(corresponding to three different age groups) and, hence, an overdispersed
process.
A key assumption of linear models is that the
variance of the response variable Y
remains constant as predictor variables change. Miller (1986) points out that a
prob-lem with using linear models is that the variance of a response variable often
does not remain constant but changes as a function of a predictor variable.
One remedy for response variables that have
changing variance when predictor variables change is to use
variance-stabilizing transformations. Such transforma-tions produce a variable
that has variance that does not change as the mean changes. The mean of the
response variable will change in experiments in which the predictor variables
are allowed to change; the mean of the response changes because it is affected
by these predictors. You will appreciate these notions more fully when we cover
correlation and simple linear regression in Chapter 12.
Miller (1986), p. 59, using what is known as the
delta method, shows that a log transformation stabilizes the variance when the
coefficient of variation for the response remains constant as its mean
changes. Similarly, he shows that a square root transformation stabilizes the
variance if the coefficient of dispersion for the response remains constant as
the mean changes. Miller’s book is advanced and re-quires some familiarity with
calculus.
Transformations can be used as tools to achieve
statistical assumptions needed for certain types of parametric analyses. The
delta method is an approximation technique based on terms in a Taylor series
(polynomial approximations to functions). Although understanding a Taylor
series requires a first year calculus course, it is sufficient to know that the
coefficient of dispersion and the coefficient of variation have statistical
properties that make them useful in some analyses.
Because Poisson variables have a constant
coefficient of dispersion of 1, the square root transformation will stabilize
the variance for them. This fact can be very useful for some practical
applications.
Related Topics
